※ 준비물 : C# , mx component , melsec Q
- mx component란 무엇인가?
PLC와 통신을 편하게 해주는 프로그램입니다.
※ 설치방법
[로그인] | 한국미쓰비시전기오토메이션(주)
kr.mitsubishielectric.com
mx component를 다운로드 받습니다.(윈도우10용으로 받았습니다.)

압축 풀고 폴더를 엽니다.
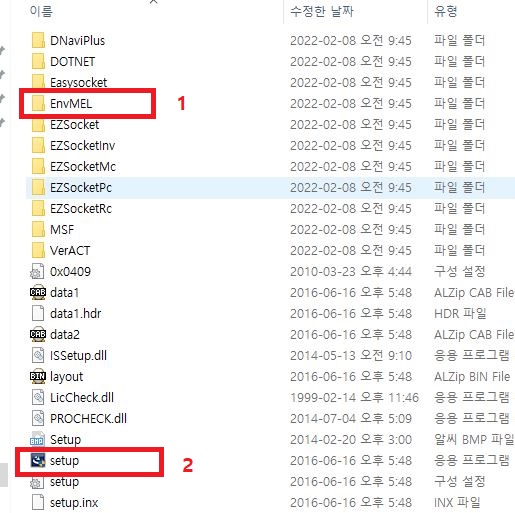
1. EnvMEL폴더안에 setup 설치를 합니다.
2. 2번의 setup 설치를 합니다.
시리얼 넘버는 GX works2를 설치할 때 사용했던 것을 사용하시면 됩니다.
gxworks2 설치했던 곳
(주)다우에프에이
공장자동화 시스템, 제품 소개, 카탈로그, 프로그램, 교육 일정, 마스크및위생용품, 문의 안내
www.dawooservo.co.kr
※ 설정방법
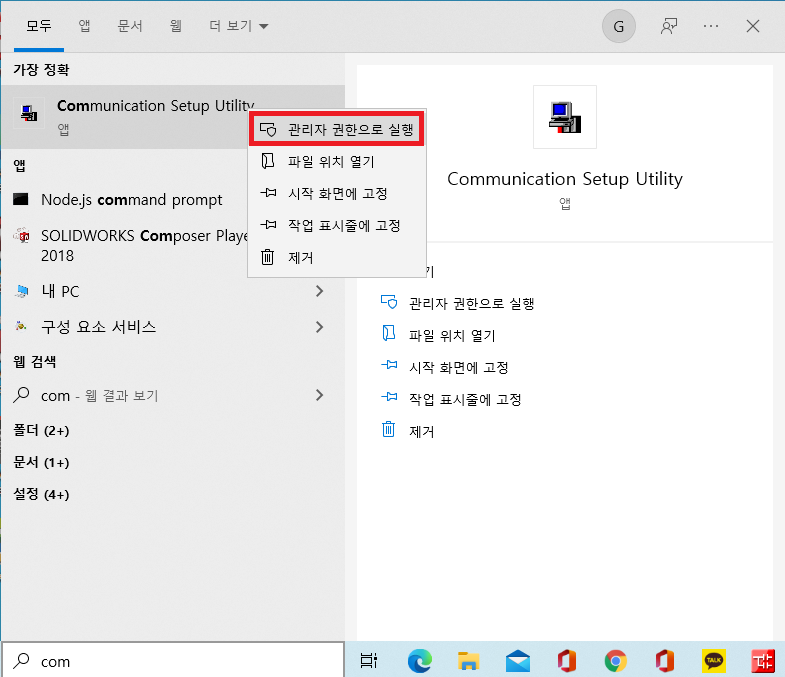
윈도우 검색에서 위의 앱을 찾아 관리자 권한으로 실행 합니다.
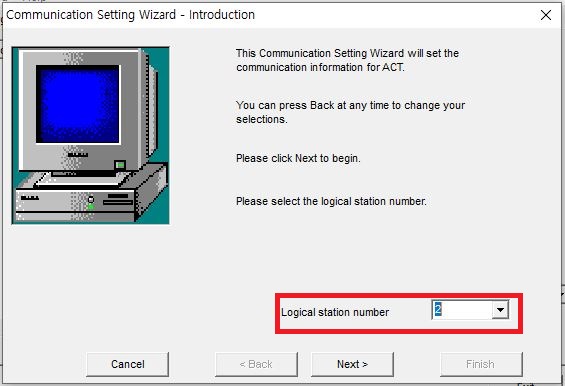
- 시뮬레이션 설정을 먼저 하겠습니다.
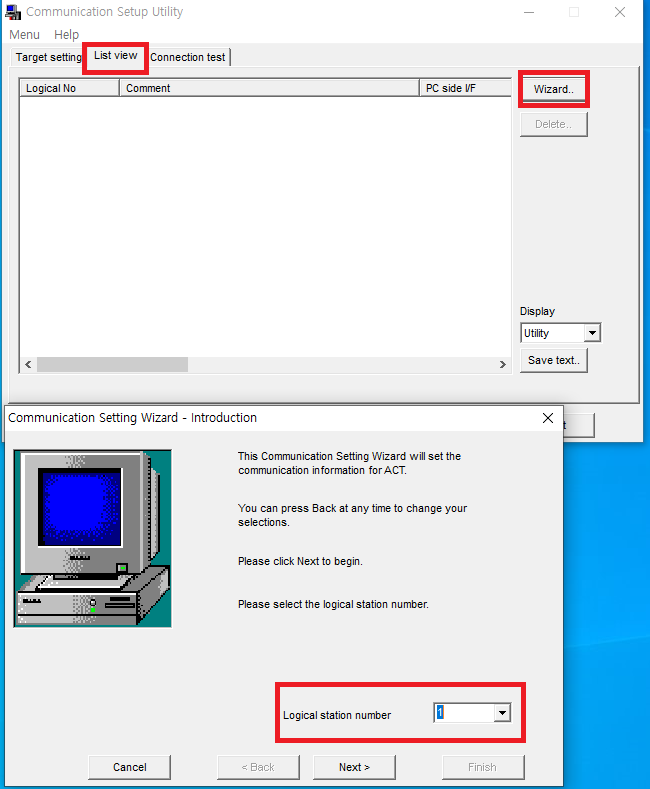
1. ListView -> Wizard -> Logical Station number순으로 설정합니다.
시뮬레이션은 1번에 저장했습니다.
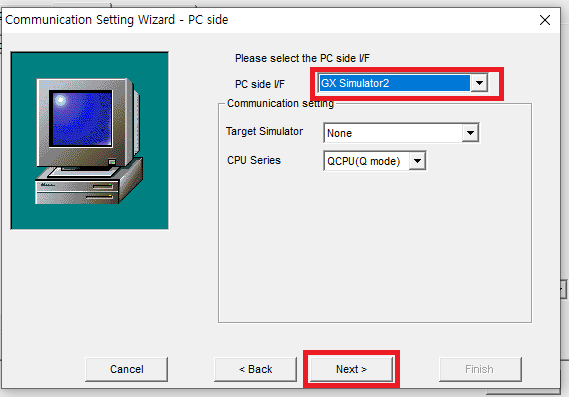
GX Simulator2로 설정을 해주시고 Next
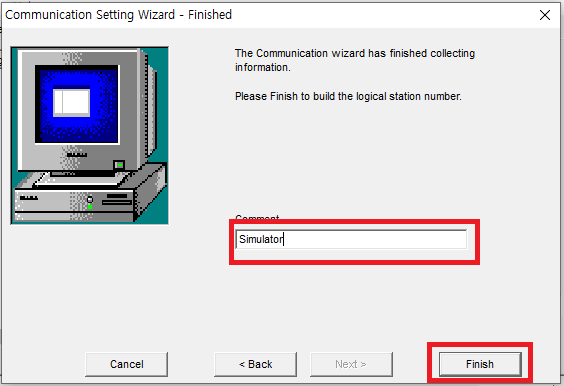
코멘트 작성하고 Finish
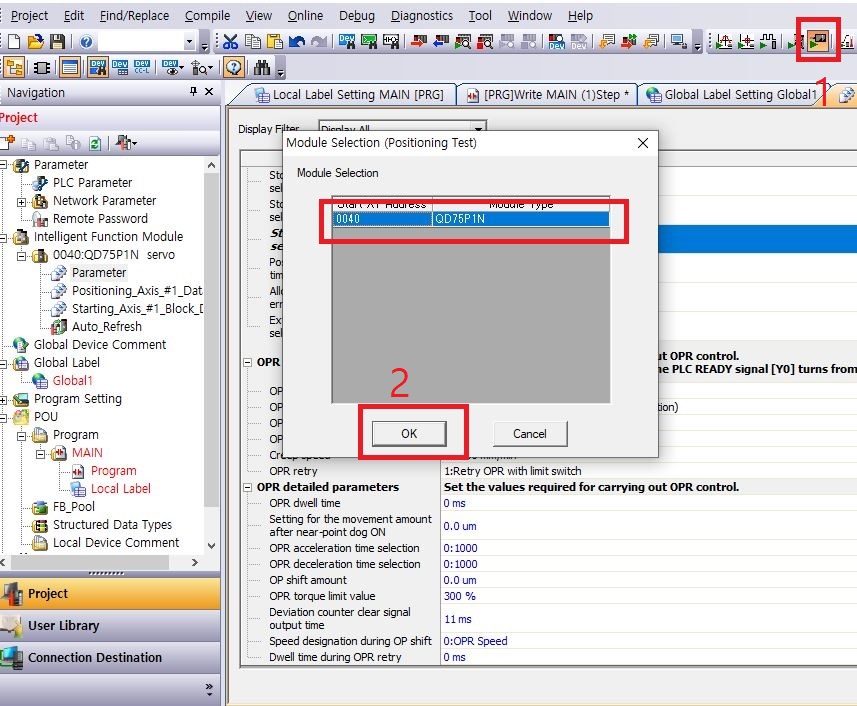
- 테스트
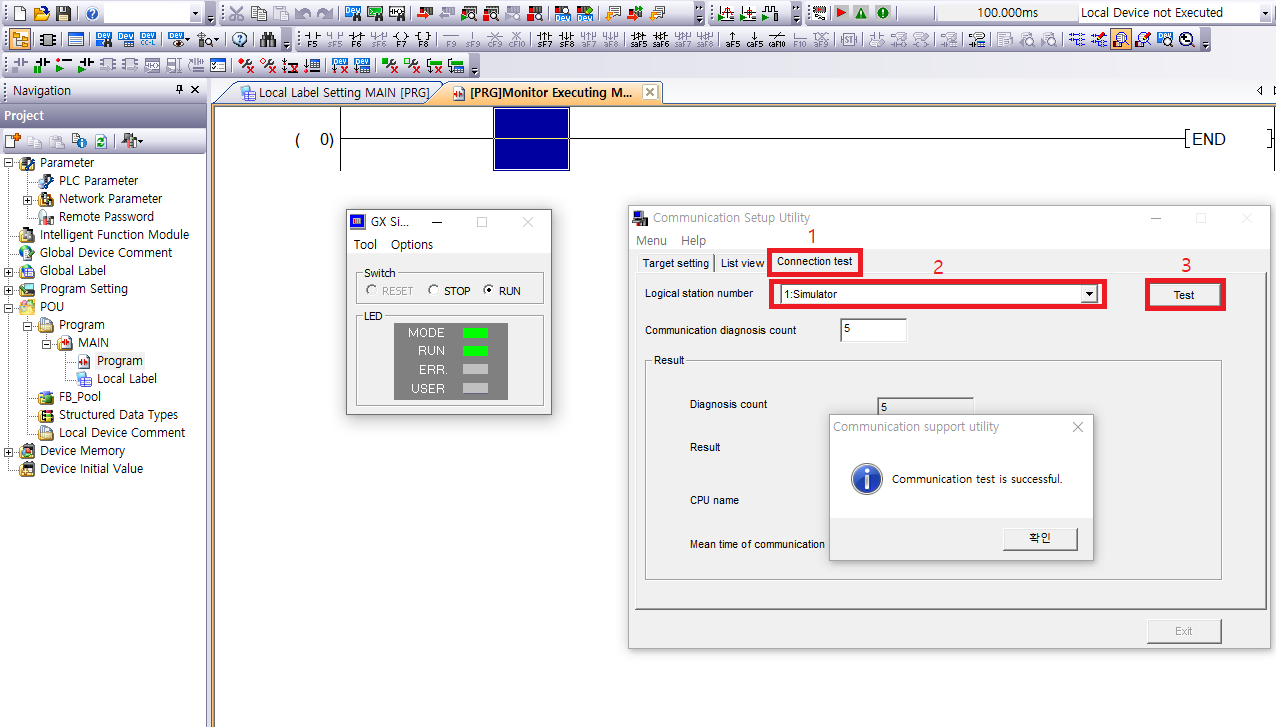
1. Gxworks2를 켜고 melsec에 컴파일 된 파일을 넣는다
2. 시뮬레이션을 켠다.
3. 빨간색 1,2,3번 순서대로 확인해서 successful이 뜨면 성공.
- 이더넷 통신을 하도록 하겠습니다.
이더넷은 2번으로 설정
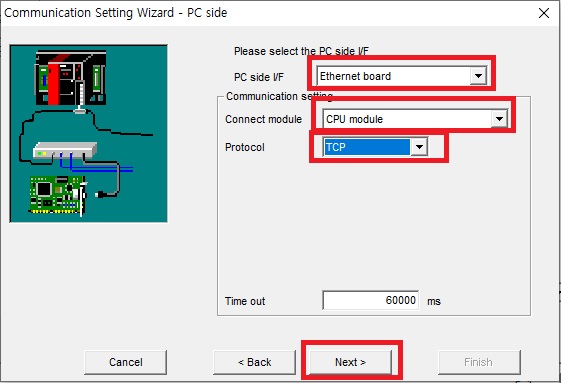
1. Ethernet board 설정
2. CPU module
3. TCP
설정해주기
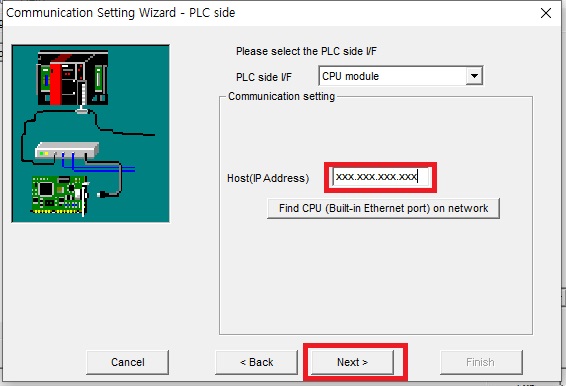
Host를 Melsec의 IP주소로 설정하면 되겠습니다.
- 테스트
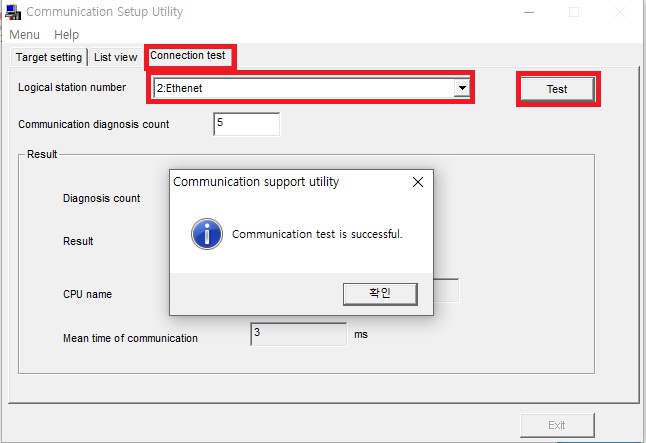
successful이 뜨면 성공
※ C#으로 프로그래밍 설정
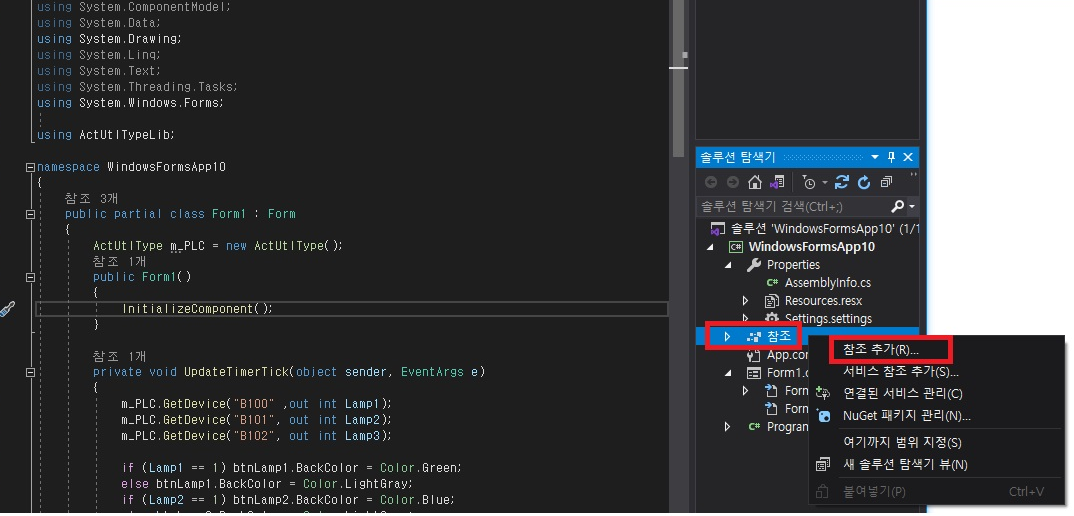
API를 써야되기 때문에 라이브러리를 추가해줘야 됩니다.

위와 동일한 라이브러리를 추가해야됩니다.
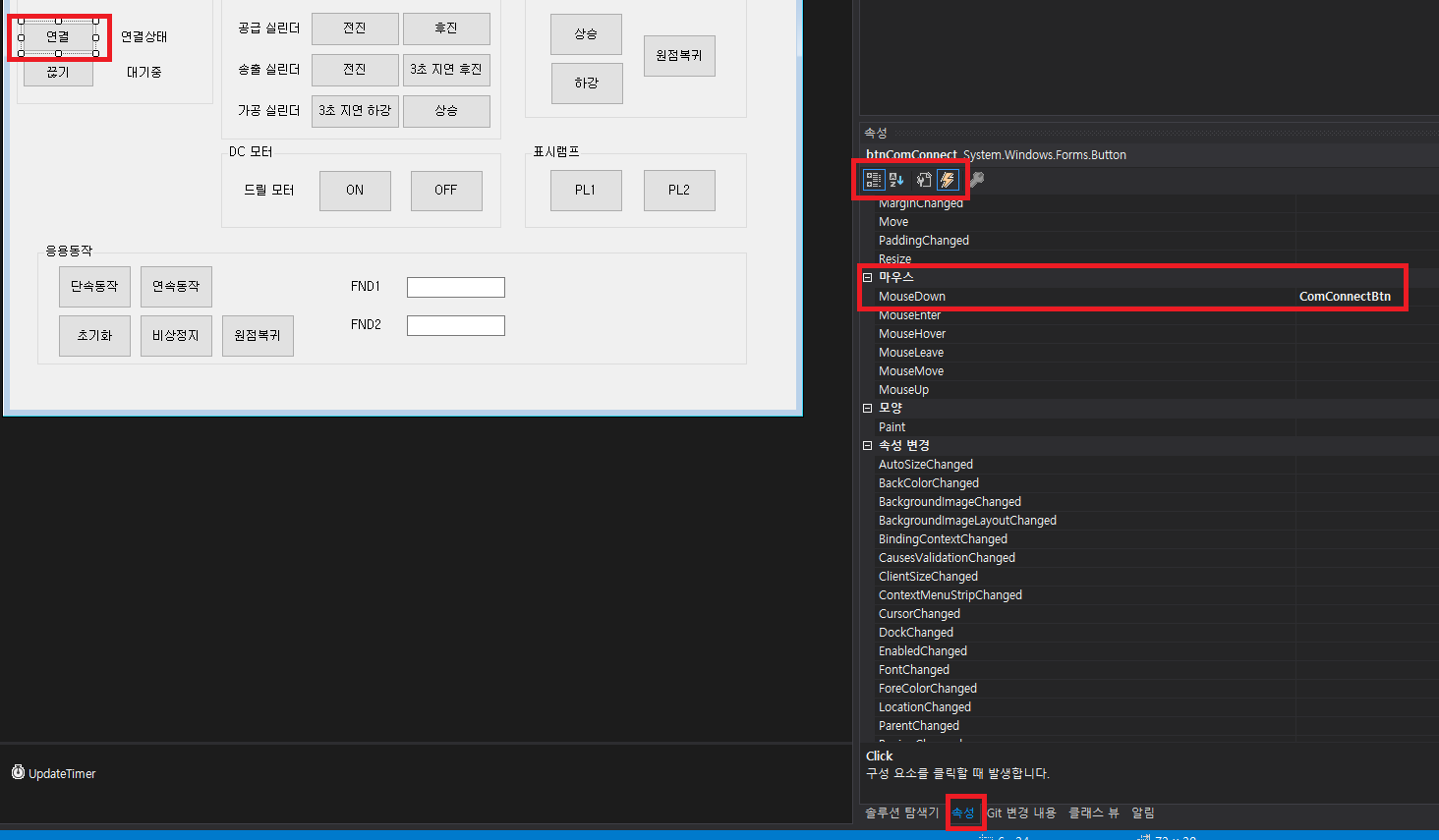
- C# Form 구조 만든 것

여기서는 연결 버튼과 공급실린더 전후진 한 내용만 올리겠습니다.
- C# 프로그래밍
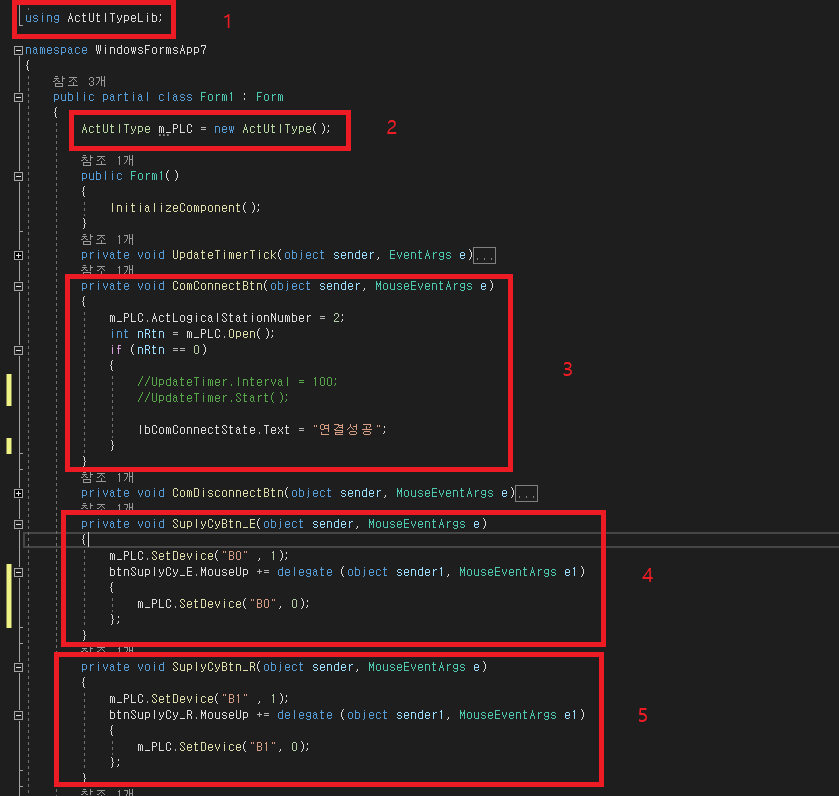
1. using ActUtlTypeLib -> 라이브러리를 사용하겠다고 추가하는 것 입니다.
2. ActUtlType m_PLC -> m_PLC란 변수로 객체를 만드는 것 입니다.
3. 시리얼 통신 연결하는 함수입니다.
void ComConnectBtn 의 함수는 위의 버튼 함수의 MouseDown을 눌렀을 때 실행되는 함수입니다.
m_PLC.AclogicalStationNumber = 2 -> 위에서 이더넷 통신하는 번호를 적어줍니다.
(여기서는 이더넷으로 통신을 합니다.)
int nRtn = m_PLC.Open() -> m_PLC.Open() 통신을 하기위해 접속을 하는 것입니다.
(성공했으면 0을 반환합니다.)
4. 공급실린더 전진을 위한 함수입니다.
m_PLC.SetDevice("B0" 1) -> SetDevice는 PLC의 메모리에 접근해서 직접 넣어주는 역할을 합니다. B0 의 메모리에 1, 즉 On을 시키는 것입니다. 단 여기서 B0가 항상 On이 되는게 문제가 됩니다.
그래서 Mouse Up이 됬을 때 B0를 0으로 바꿔주기 위해 delegate의 무명메서드를 사용합니다.
(Delegate가 어려우면 아래의 방법으로 해도됌)
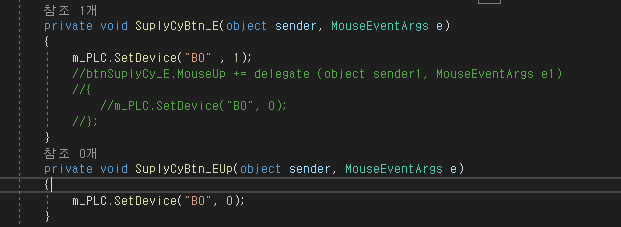
5. 공급실린더 후진을 위한 함수입니다.
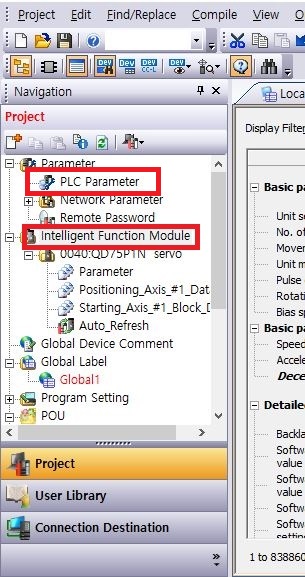
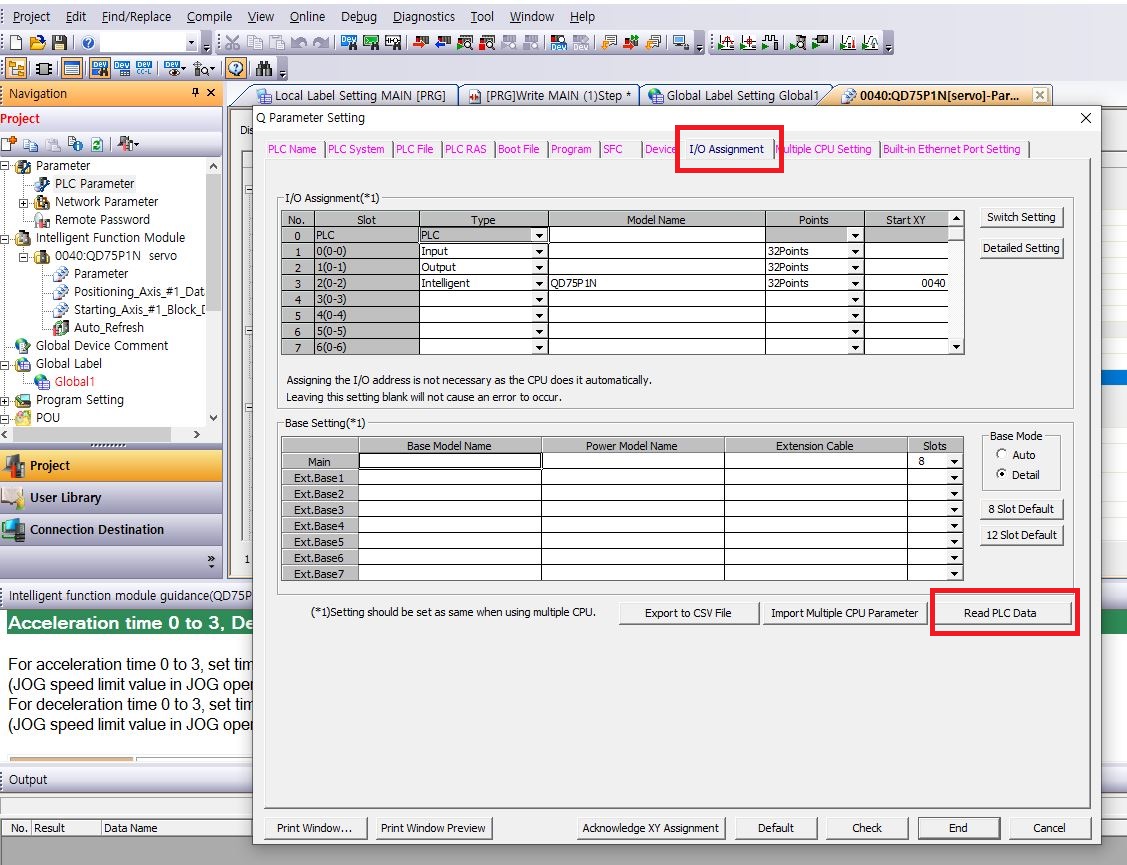
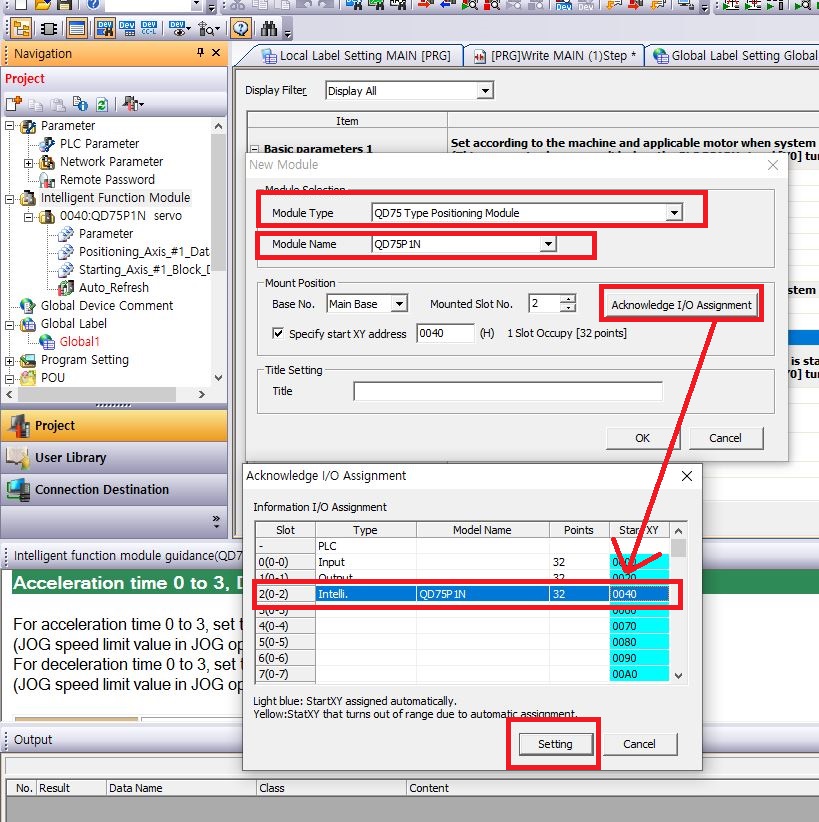
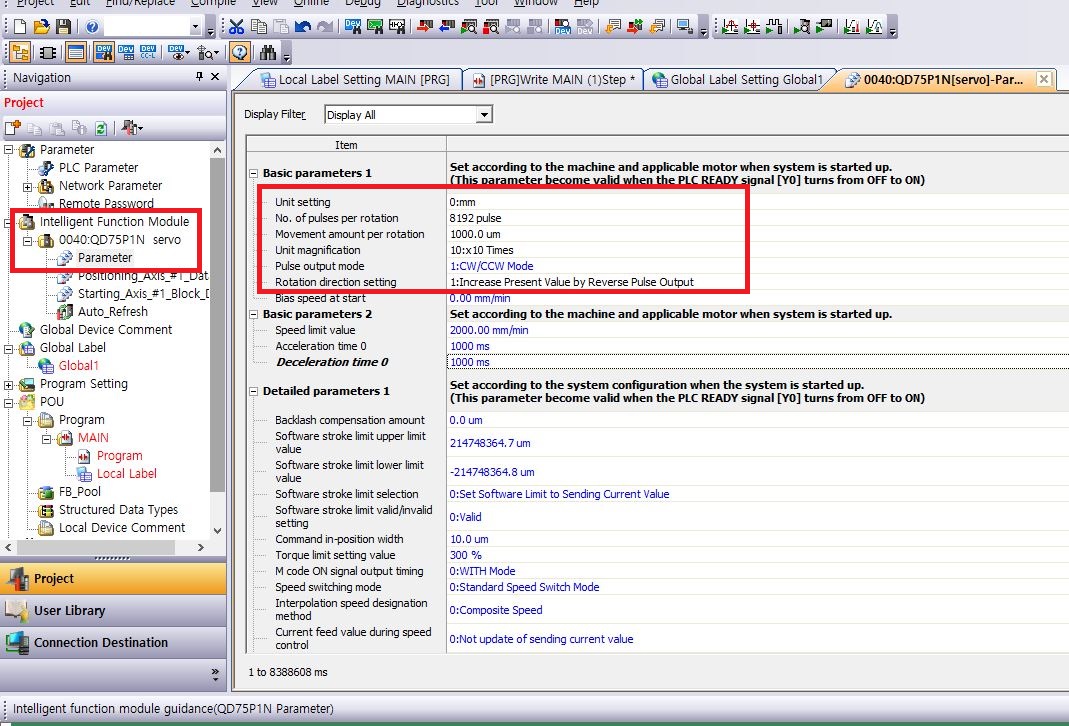
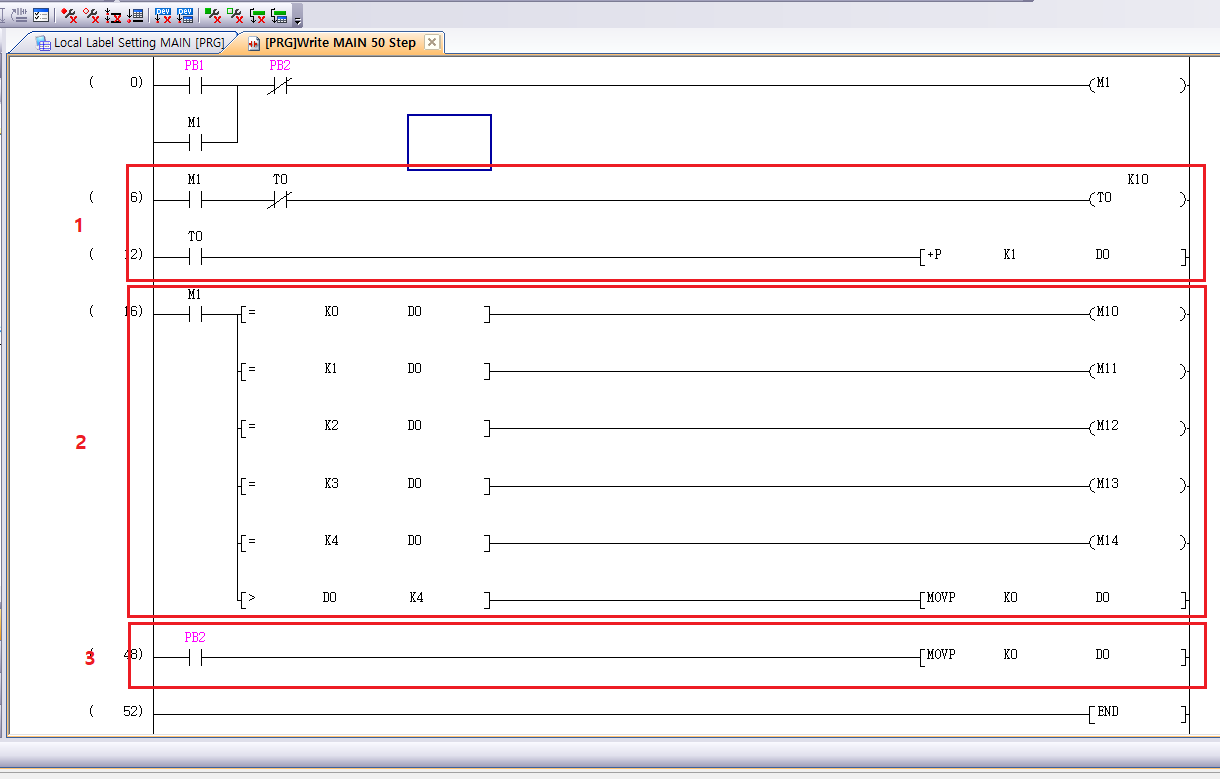
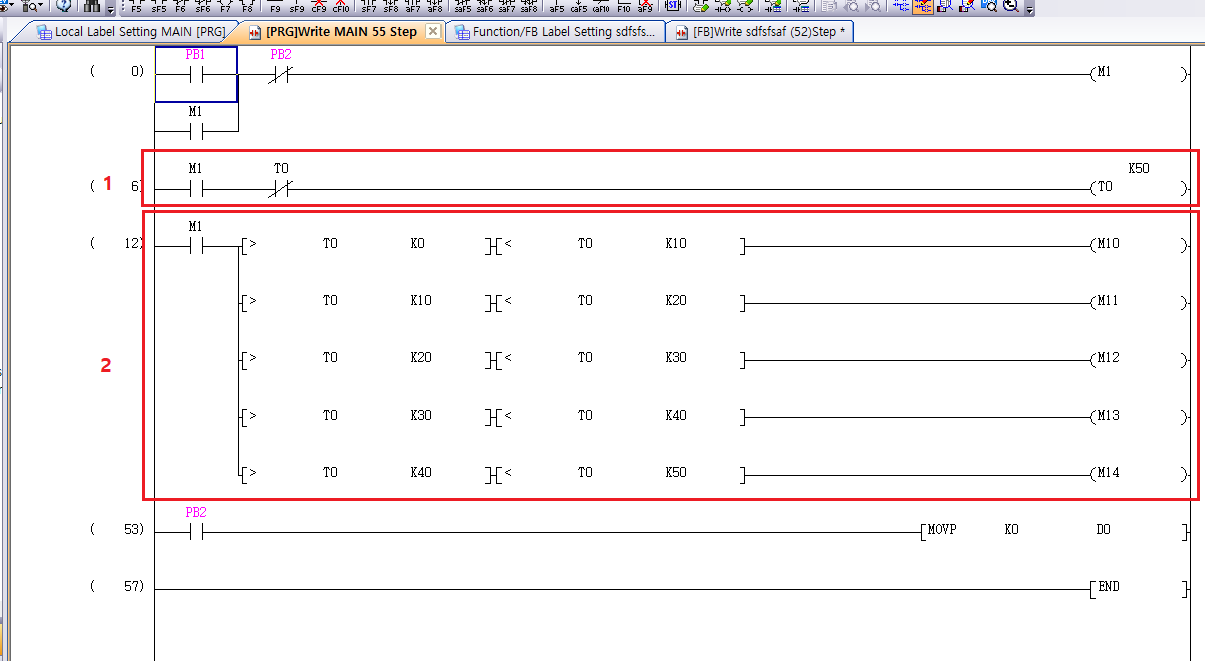
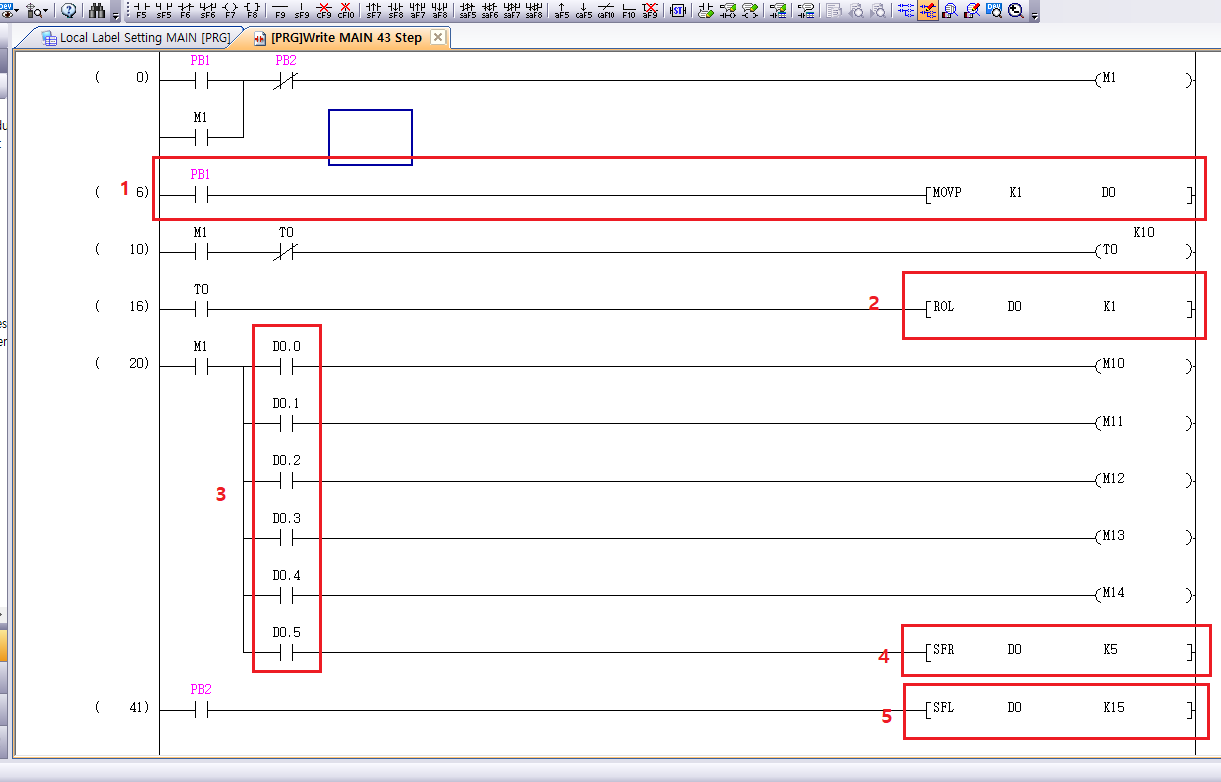
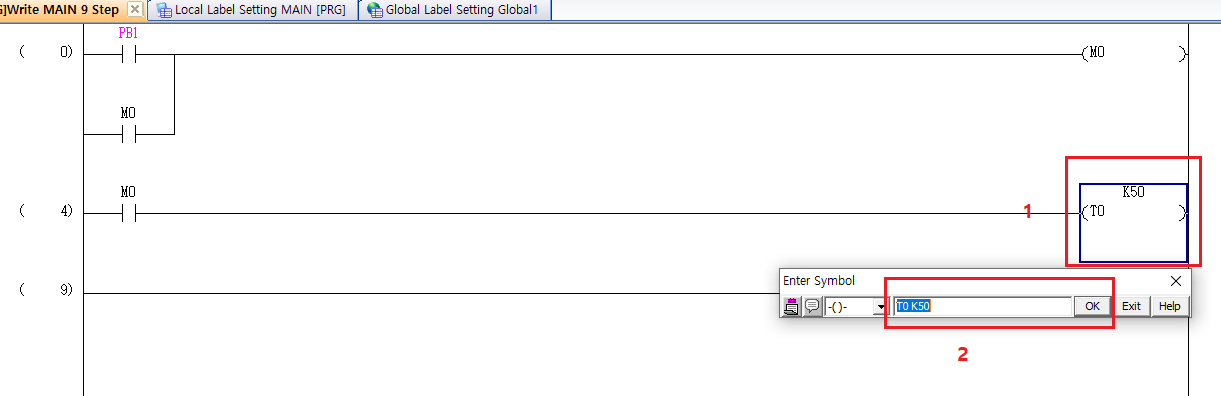
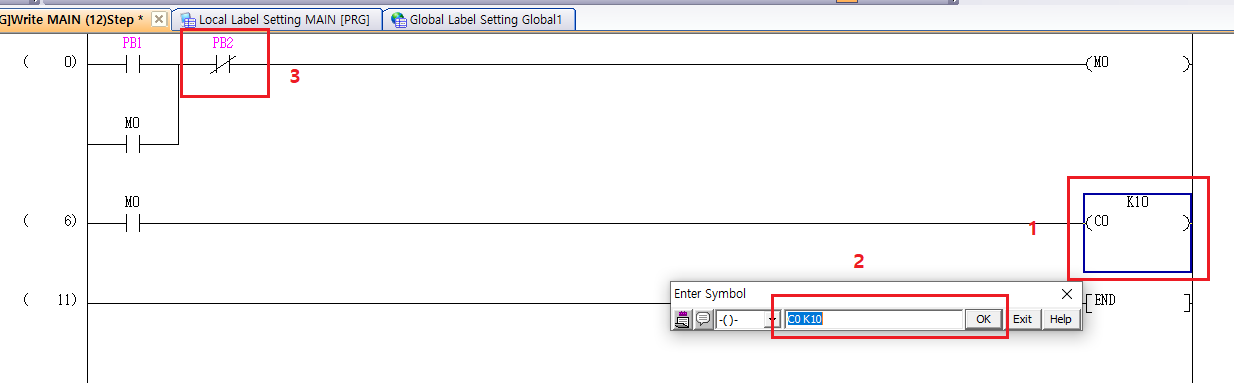
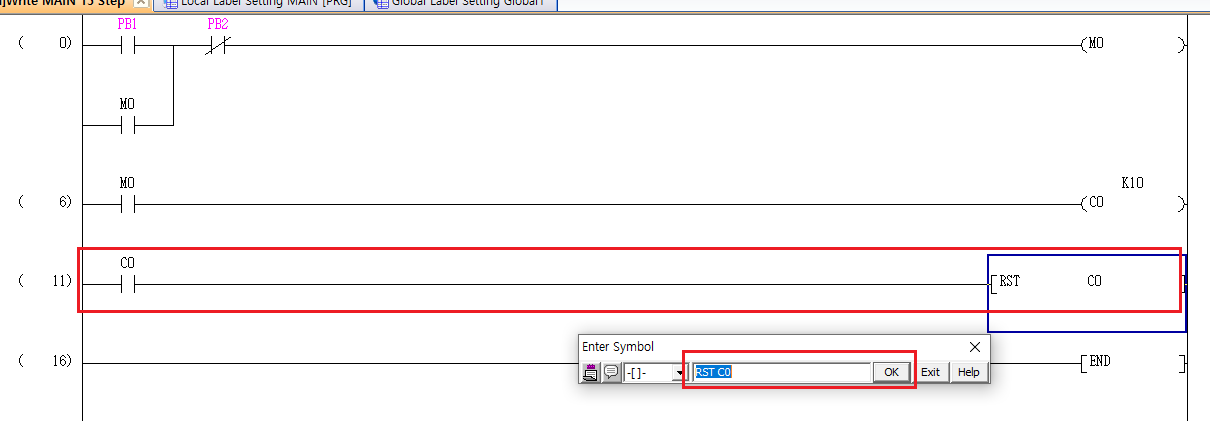
- PLC 프로그래밍
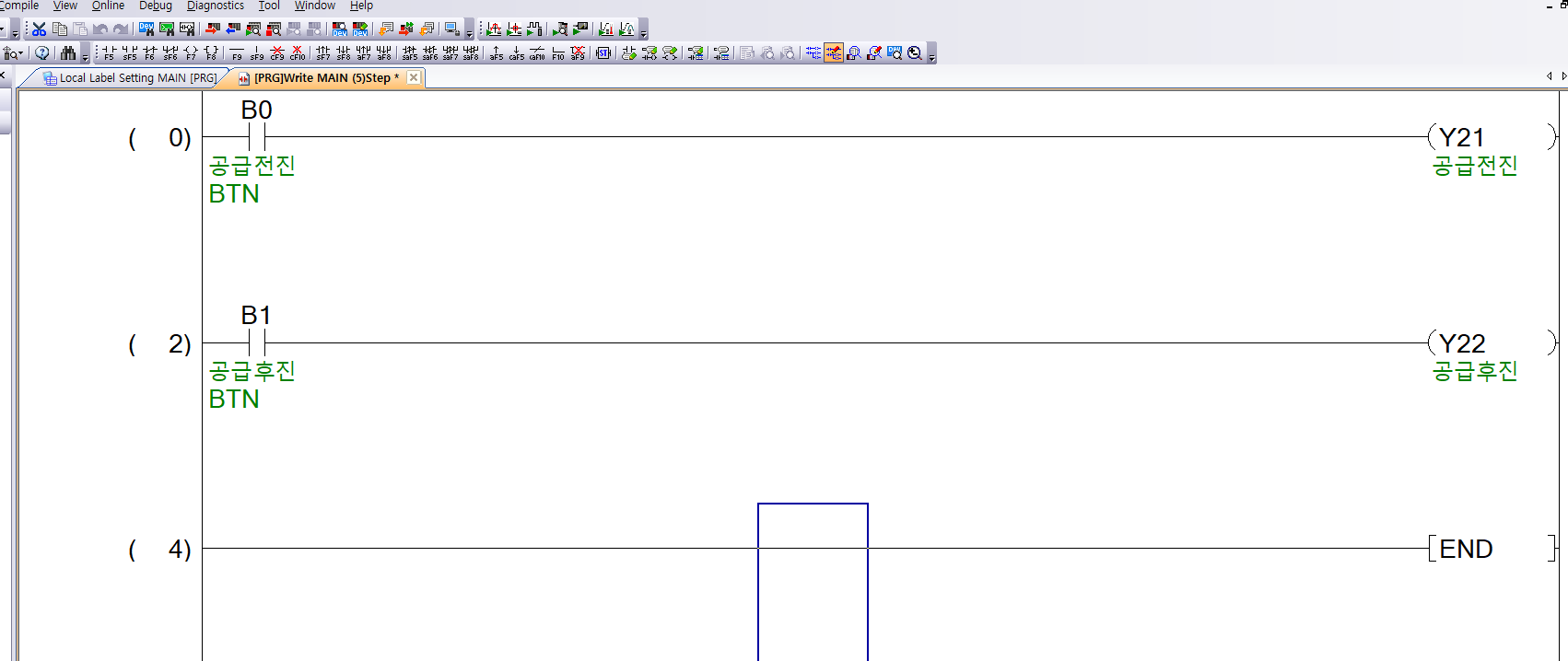
끝~
'PLC > 미쯔비시 MELSEC QCPU LADDER용' 카테고리의 다른 글
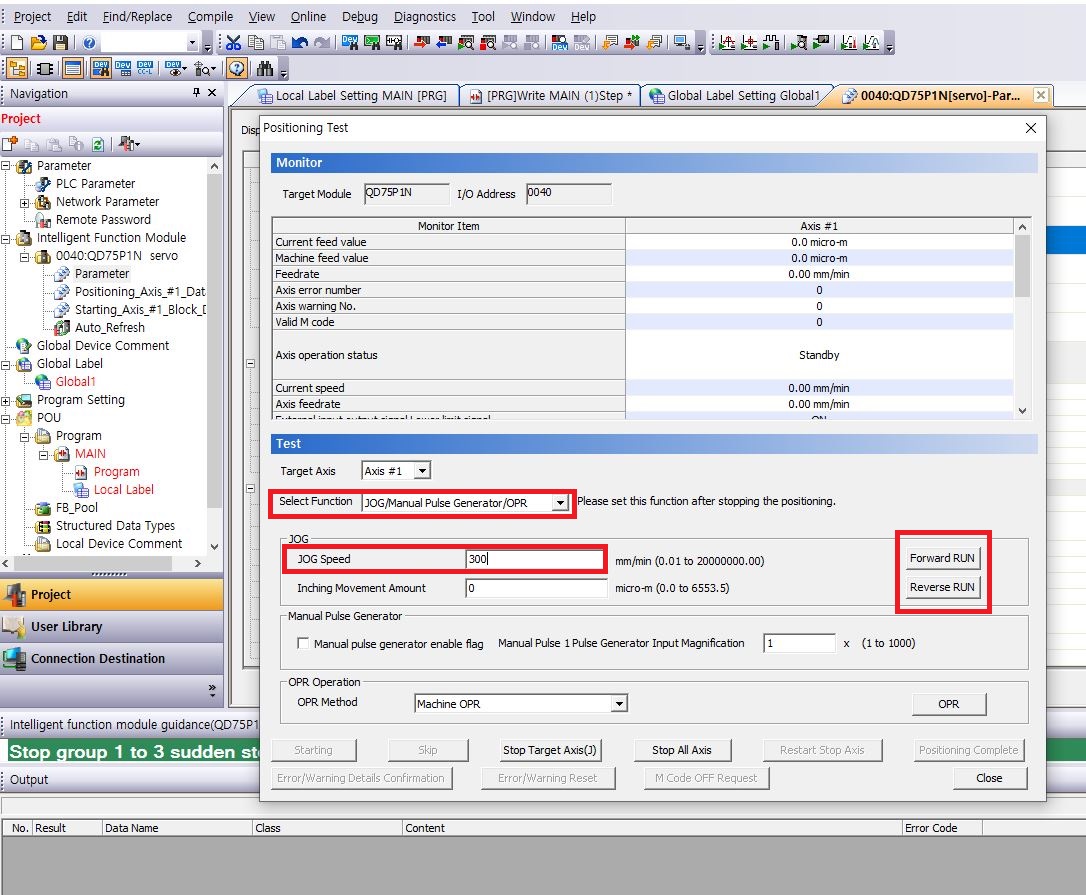
| 서보모터 기본 및 사용법 (0) | 2021.12.21 |
|---|---|
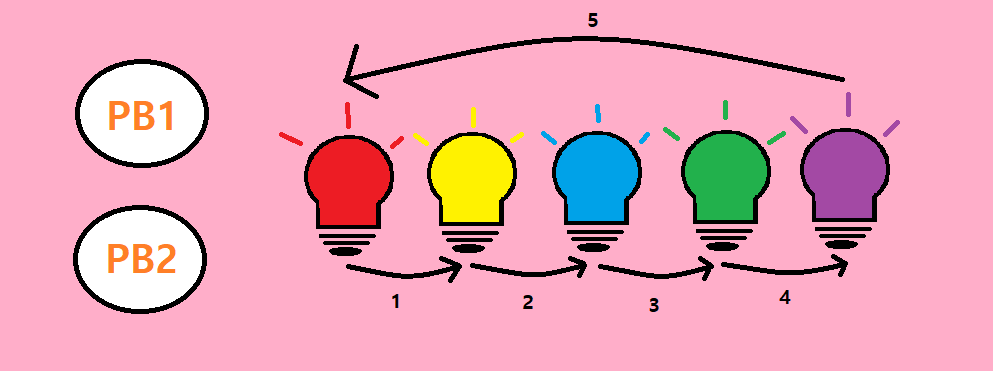
| 미쯔비시 MELSEC QCPU LADDER 순차적 램프 제어 (0) | 2021.11.30 |
| 미쯔비시 MELSEC QCPU LADDER 타이머, 카운터 (0) | 2021.11.28 |
| 미쯔비시 MELSEC QCPU LADDER 스캔타임 ,자기유지,스텝퍼방식 (0) | 2021.11.28 |
| 미쯔비시 MELSEC QCPU LADDER 라벨 붙이기 (0) | 2021.11.28 |