CPU : QD75P1N , 앰프 : MR-J4-10A를 사용하였습니다.
QD75P1 : QD75 => 위치모듈종류 , P => 오픈컬렉터(만약 D=> 차동드라이버)
(참고 : 오픈 컬렉터는 노이즈잡기가 힘듬. 차동 드라이버는 노이즈잡기가 수월함.)
----------------------------------------------------------------------------------------------------------------------------------
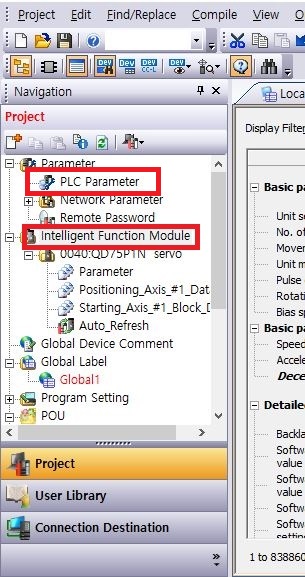
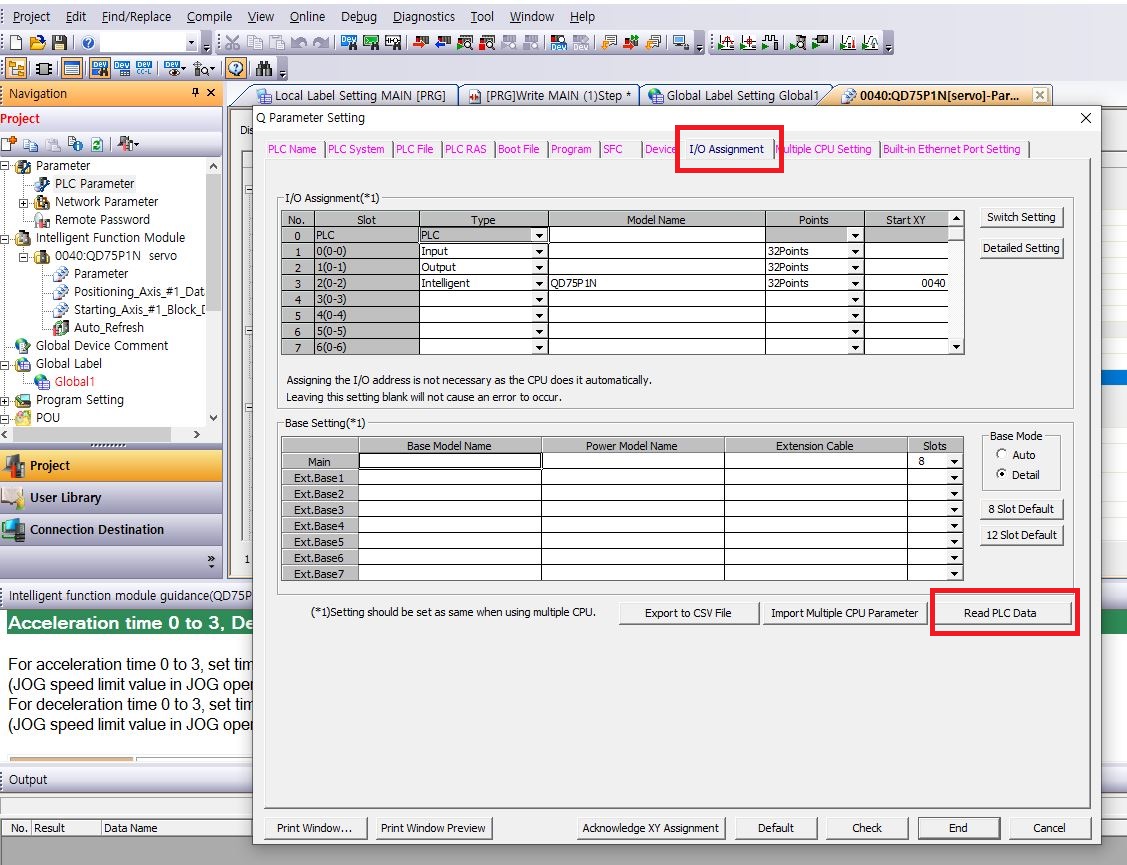
- PLC Parameter에서 I/O Assignment에서 Read PLC Data를 불러온다.
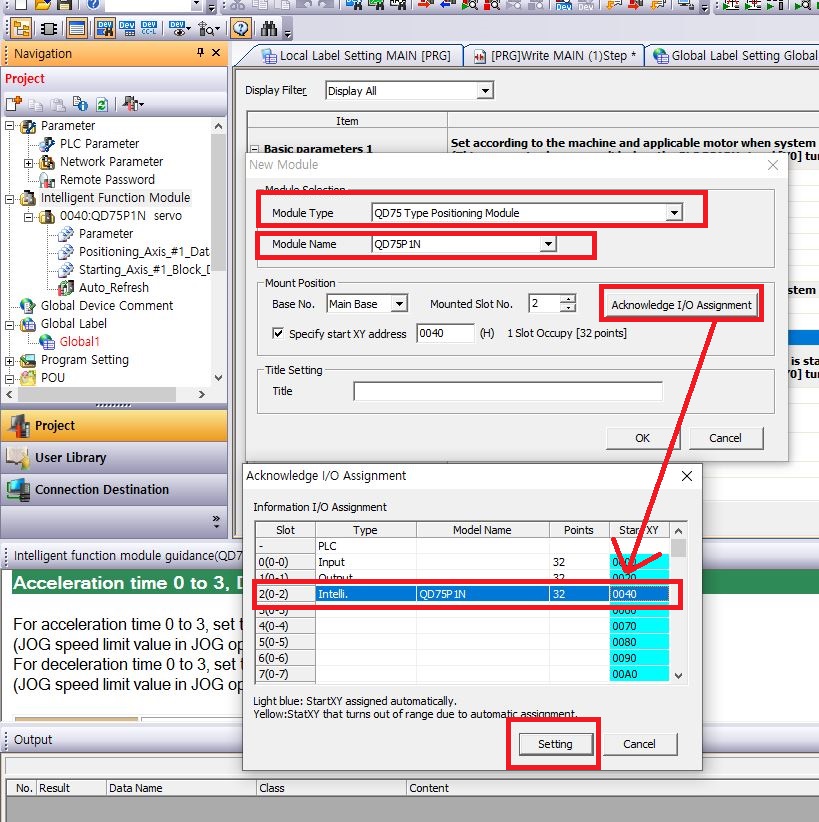
- Intelligent Function Module -> New Module로 파일을 새로 만든다.
- QD75 Type Positioning Module로 설정
- QD75P1N로 설정.
- Acknowledge I/O Assignment 클릭 -> Intelli. 클릭후 Setting 을 눌러서 설정
----------------------------------------------------------------------------------------------------------------------------------
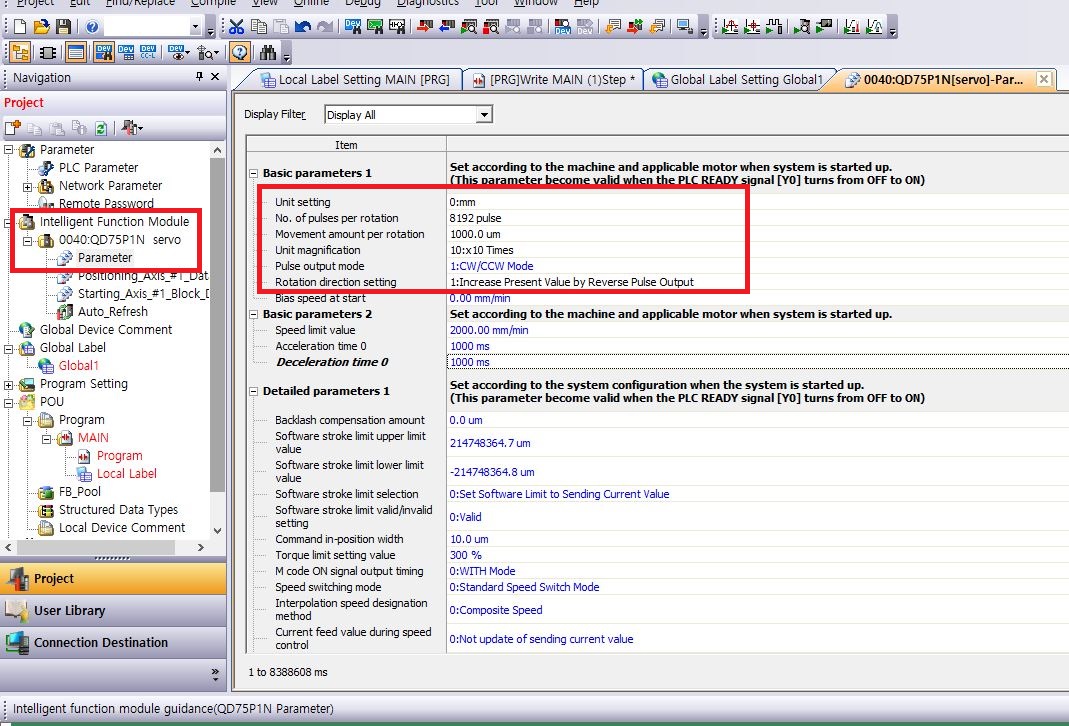
- Intelligent Funtion Module -> Parameter 을 더블 클릭을 한다.
- Unit setting : mm로 설정(초기에 움직을 서보모터 단위)
- No, of pulses per rotation : 서보 모터 1번 회전 시 펄스 수
(참고 : hg-kr13의 모터의 경우 최대 분해능 2^22이므로 전자 기어비를 사용하여 최대 분해능 수치를 맞춘다. Ex) PLC 설정 분해능 값 : 2^13 => 8192 , 앰프 분해능 값 : 2^9 => 512로 설정 그래서 최대 분해능 2^22을 맞춘다.)
- Movement amount per rotation : 서보 모터 1번 회전 시 이동거리 설정 여기선 10mm로 설정이 되어있어 , 마이크로 단위로 변경 10000um인데 PLC에서 설정값을 초과하기 때문에 1000um로 설정한다.
- Unit magnification : Movement amount per rotation의 설정값의 배율을 설정한다.
위에서 1000um를 설정하고 10배로 설정하면 10000um가 설정이 되어진다.
- Roatation direction setting : 서보 모터 회전 방향을 결정하여 전진or 후진을 설정할 때 필요하다. (일단 돌려보고 전진,후진 선택을 하여 조정하면 되겠다.)
----------------------------------------------------------------------------------------------------------------------------------
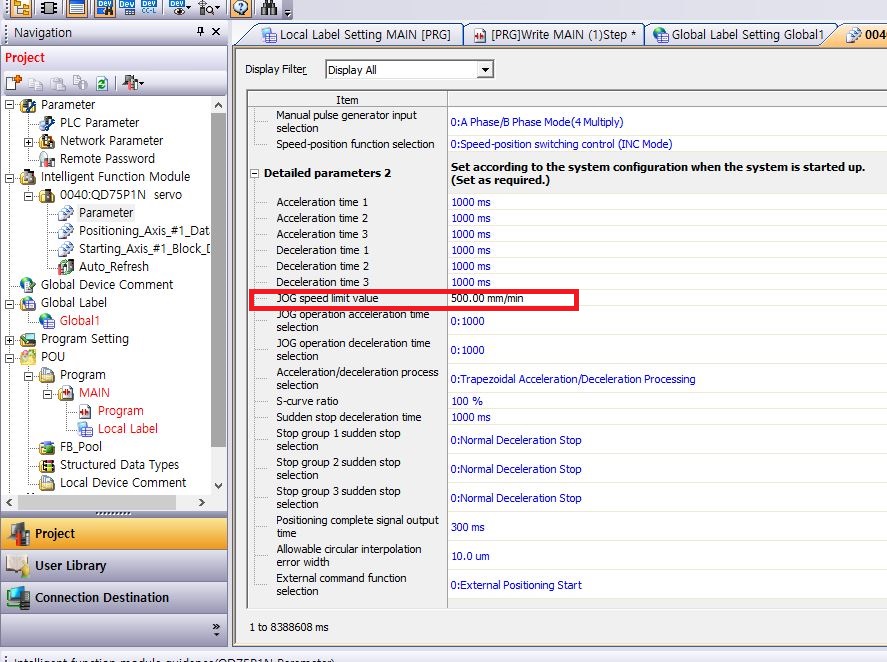
- JOG speed limit value : 수동으로 제어 하기 위해 JOG 스피드 조절.
----------------------------------------------------------------------------------------------------------------------------------
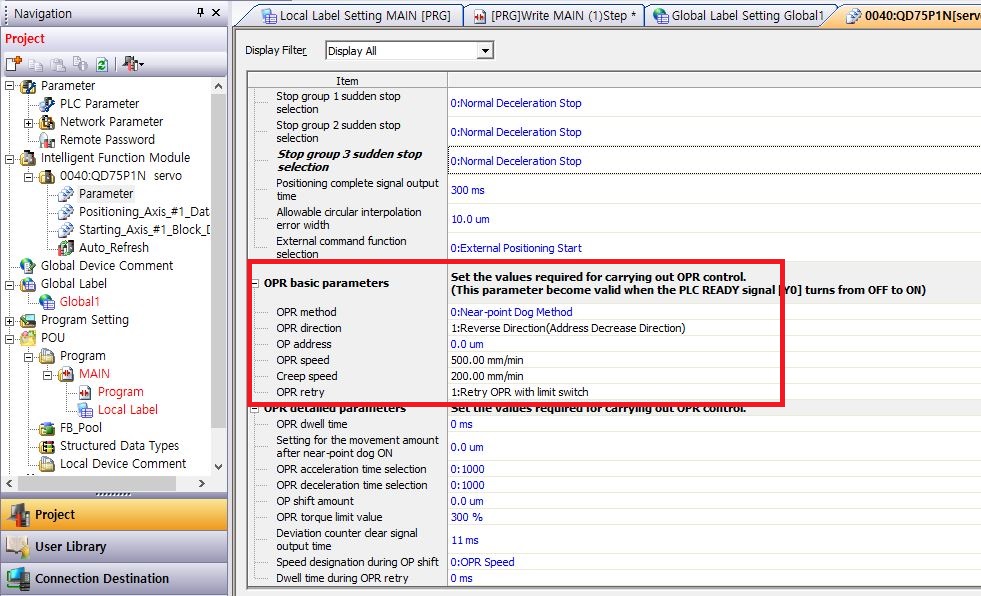
OPR : 원점복귀
- OPR method : Near - point Dog Method로 설정 (DOG 방식으로 설정. 아래에 설명)
- OPR direction : Reverse Direction(Address Decrease Direction) 으로 설정(아래에 설명)
- OPR speed : 500mm/min으로 설정
- Creep speed : 200mm/min으로 설정(아래에 설명)
- OPR retry : Retry OPR with limit switch로 설정(아래에 설명)
아래는 왜 이렇게 설정했는지 설명이다.
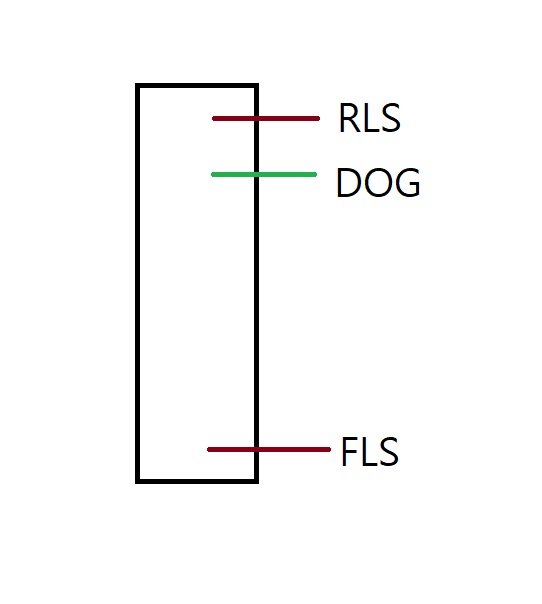
RLS : 하한 센서 (하한 Limit 값)
FLS : 상항 센서 (상한 Limit 값 )
DOG : 전원을 껏다가 켰을 시 원점을 복귀하기 위해선 기준이 되는 무언가가 있어야된다. 그래서 서보모터가 움직였을 때 DOG의 기준으로 원점을 찾기 위해 달아둔 센서이다.
% Creep speed 는 그림 6과 같이 OPR method(여기에선 DOG방식)와 원점 간의 사이에 Speed를 조정하는 값이다.
% OPR direction 는 원점 복귀를 FLS방향으로 시작을 할것이냐, 아니면 RLS 방향으로 시작을 할 것이냐라는 이야기임. 위에선 DOG방식으로 하니깐 DOG방향으로 설정함 그래서 Reverse Direction으로 설정
% Retry OPR 는 FSL, RSL에서 한번더 원점을 찾을지 설정하는 것이다. 여기선 한번더 원점 찾는걸로 함.
----------------------------------------------------------------------------------------------------------------------------------
TEST
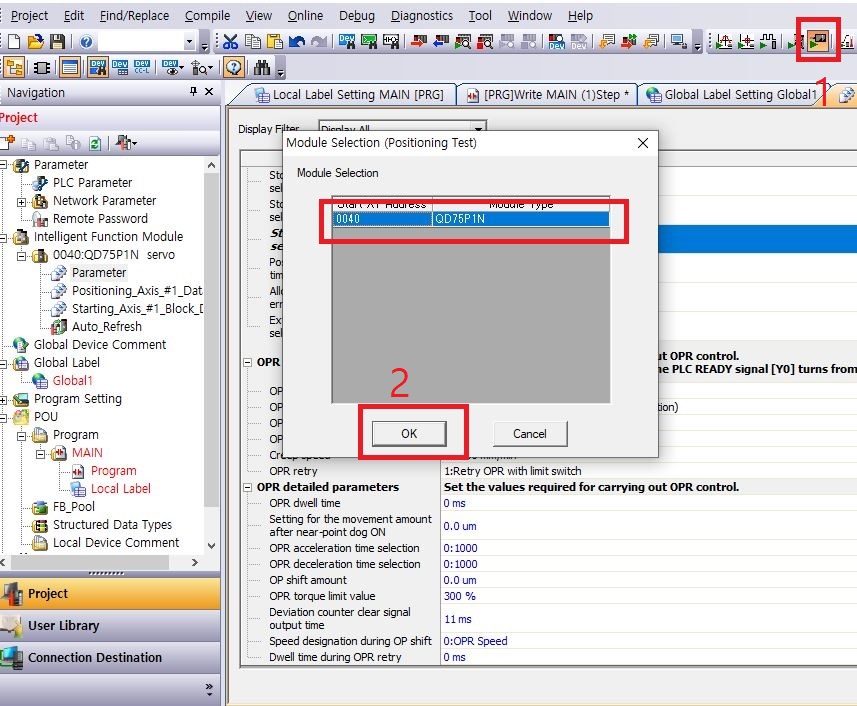
순서대로 누른다.
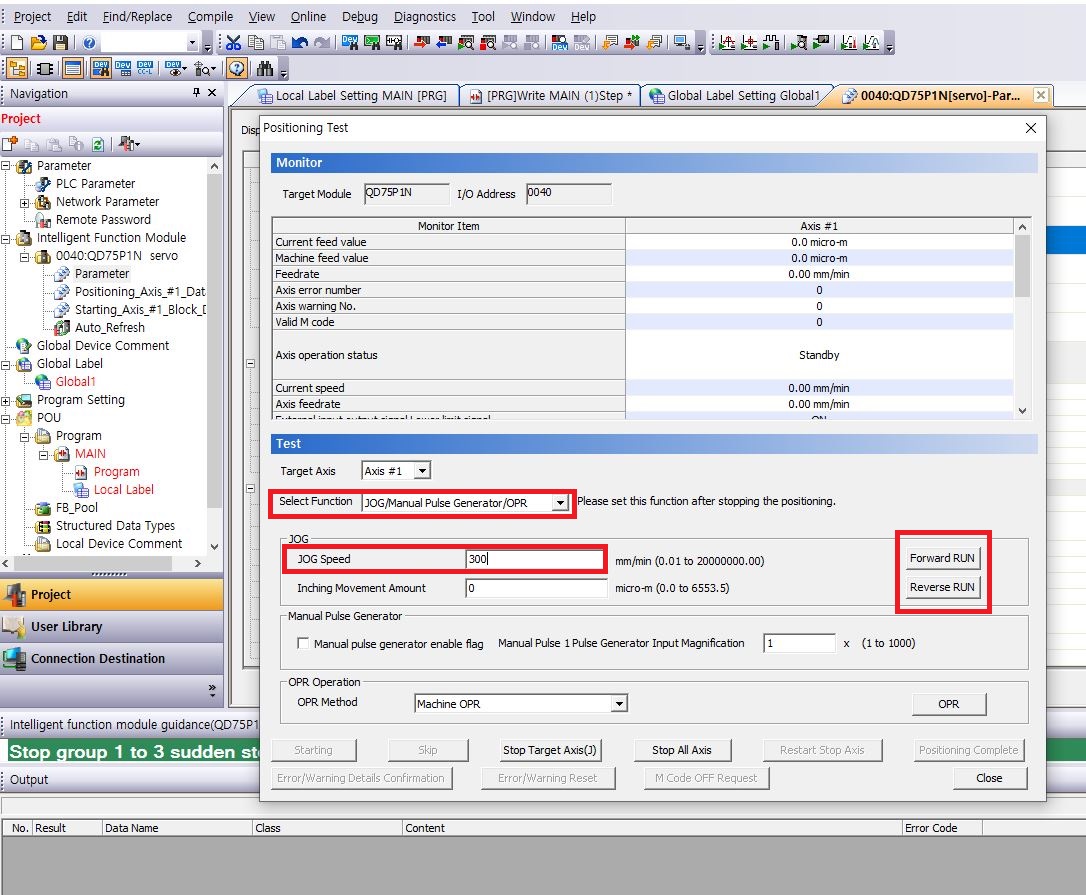
Select Function : JOG/Manual Pulse Generator /OPR 로 설정
JOG Speed : 300으로 설정
Forward RUN , Reverse RUN으로 서보모터 JOG 조정하면 끝.
'PLC > 미쯔비시 MELSEC QCPU LADDER용' 카테고리의 다른 글
| mx component 를 사용한 PLC 동작시키기 (4) | 2022.02.11 |
|---|---|
| 미쯔비시 MELSEC QCPU LADDER 순차적 램프 제어 (0) | 2021.11.30 |
| 미쯔비시 MELSEC QCPU LADDER 타이머, 카운터 (0) | 2021.11.28 |
| 미쯔비시 MELSEC QCPU LADDER 스캔타임 ,자기유지,스텝퍼방식 (0) | 2021.11.28 |
| 미쯔비시 MELSEC QCPU LADDER 라벨 붙이기 (0) | 2021.11.28 |